SIMULATED MISSION
Androver I on a space mission
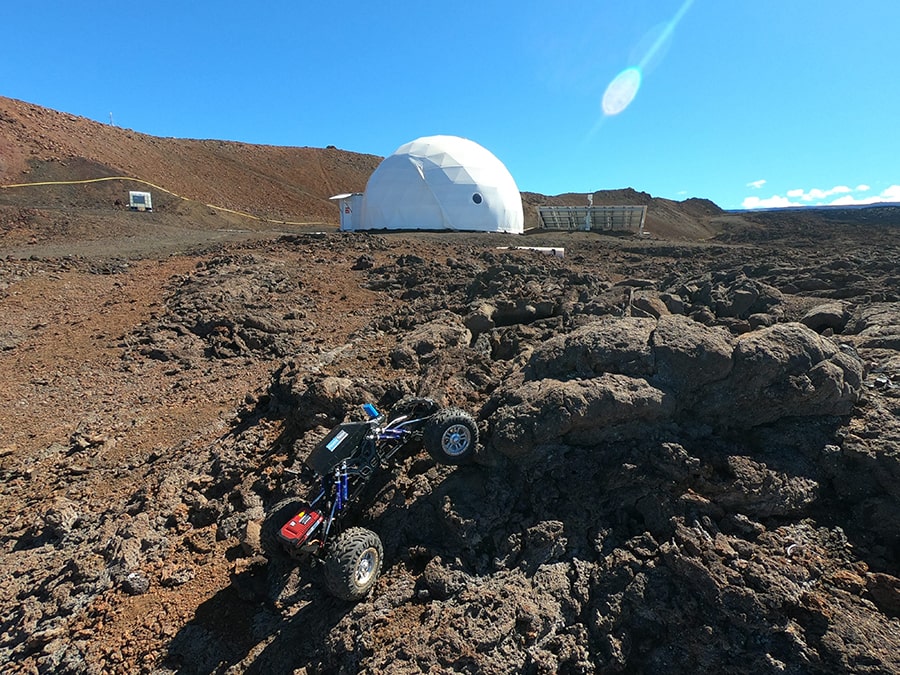
Androver I is a mobile robot developed by RoboTech Vision that was used for a simulated space mission at HI-SEAS in Hawaii, carried out under the auspices of the ESA. The mission, led by astrobiologist Michaela Musilová, focused on researching lava caves, similar to the lunar surface, in which people could one day build their first dwellings.
The goal of the rover was to document the challenging volcanic area with a rotating camera even in less accessible parts. The rover helped the team by moving smoothly in sharp and steep terrain. The team used it to explore obstacles that could harm astronauts. The robot is controlled by a joystick and moves more efficiently in the field thanks to the Double Ackerman chassis.
FEATURES AND TECHNOLOGIES
Teleoperator control
The mobile robot is controlled by an ergonomic joystick. Its radio connection has a range of approximately 500 meters.
Exploratory camera
The camera located in front of the robot provides live view. This enables exploration of less accessible or dangerous areas.
Double Ackerman chassis
Effective passability of the robot through the terrain is ensured by a Double Ackerman chassis, with two DC motors and two servomotors.
REFERENCES

“We also tested two other robotic vehicles provided by ESA on the mission. We also had to find the limits of their action in the terrain and possible applications on missions. Of all three rovers, RoboTech Vision’s Androver I worked best. It had the longest endurance, overcame the most difficult obstacles and we were able to control it from inside the HI-SEAS station.”
– Dr. Michaela Musilová, SOSA



The company focuses on the development of autonomous robots with AI elements. It strives to develop universal solutions for various tasks, industries and environments.
SOFTWARE
AON algorithm
AVN algorithm
ADN algorithm
ORC algorithm
PRODUCTS
Caster
Crawler
RTV sensor Box
CONTACT
Červený kameň 61
900 89 Častá
Slovakia

