RoboTech Vision introduces the new Crawler offroad UGV robot

August 4, 2021 | News
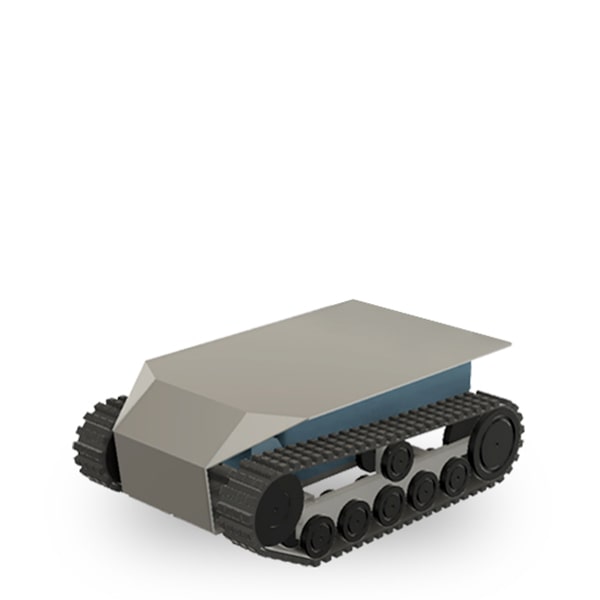
More than six months after the launch of the first commercial Caster robotic platform, designed especially for interiors, RoboTech Vision decided to expand its portfolio with another robot called Crawler. It is a platform based on a track chassis suitable for demanding terrain, which the device encounters, for example, in agriculture, military applications or when exploring an unknown area.
Although RoboTech Vision never focused primarily on hardware development, it has reached this stage after years of debugging autonomous navigation algorithms. “You have two options when testing software with AI. Create a simulation where usually everything works perfectly, but it differs from reality, or test algorithms directly in the outdoors. Our company prefers the second option. This required robotic chassis. We started with testing platforms, so we gradually came to commercial robots,” explains the manager of RoboTech Vision, Ing. Martin Smoľák.
Navigation using artificial intelligence
Testing and development platforms included the Androver II robot with a Double Ackerman chassis developed from the ground up by RoboTech Vision and the Husky A200 robot with differential kinematics from the Canadian company Clearpath. The company’s algorithms were thus debugged for different kinematic structures and different environments. “We used the Androver II robot mainly for autonomous navigation in vineyards, while Husky was used for autonomous navigation on the road. Now these platforms will replace robots suitable for sale,” adds another of the company’s managers, Ing. Peter Pásztó, PhD. While the Caster robot is developed mainly for the interior, the Crawler robot is designed more for the outdoors. The company plans to introduce another model soon, Differ, designed for paved roads outside and for various research purposes.
“The Caster, Crawler and the upcoming Differ robots will be built on a differential chassis. However, the Androver II testing platform had Double Ackerman kinematics. This does not mean that turning all the wheels in the outdoors did not work for us. On the contrary. We also plan to develop a commercial platform with Double Ackerman. However, specifically in the vineyard, where the four-wheel Androver II was used, the track chassis proved to be more suitable. We therefore had to adapt the autonomous vineyard navigation to the differential chassis. We can now adapt all our algorithms very quickly to the chassis of various kinematic structures and deploy them not only on the robot, but also on other existing devices. Autonomous movement works without GPS only with the help of a visual system and artificial intelligence, which expands its possibilities of use.”

Autonomous robot and car
A similar attempt has already been made by RoboTech Vision, which modified part of the AON algorithm to create an off-road assistant. Algorithms, which until then were deployed only on a robot, were applied together with a sensor system to a car, which was then able to find a suitable path in the outdoors for autonomous movement. During its many years of development, the company has worked not only with different types of devices, but also with different types of tasks and different environments. An example is the success of the Androver I robot, which coped best with challenging volcanic terrain on a simulated space mission. The challenging terrain will also be one of the main challenges for Crawler.
“We developed Crawler robot to deal with uneven terrain, not overheat, and last as long as possible. These were often the biggest limitations of testing platforms, as we use computationally intensive neural networks in our software. In addition, Crawler is a very quiet and accurate platform. This is ensured in particular by BLDC drives with worm gearboxes and precise position control of the robot. The device can thus also perform really sensitive operations, such as local vineyard spraying. It is also possible to load Crawler with an 80 kilogram load or to attach a mower, for example, which will maintain the terrain in addition to the movement.”
Obstacle detection and docking
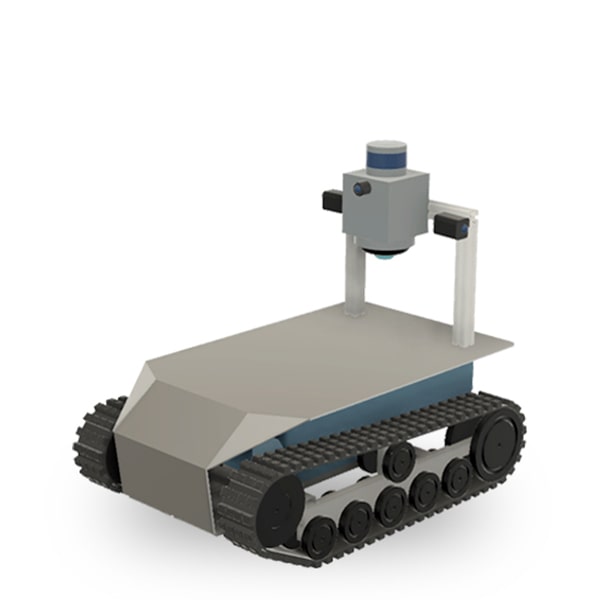
The company offers several versions of the robot. The first is the R&D platform, especially suitable for universities or research institutions, which can further modify the device according to their ideas or put their own sensors on it. The second type is a robot controlled by a teleoperator using an application, which can be equipped with a robotic arm from Spinbotics or other equipment as required. All versions of the robot have IP 65 protection and a low centre of gravity, extending their field of action regardless of the weather or the slope of the terrain. The highest class is the autonomous version supplemented by an RTV sensor Box and the AVN algorithm. The device can thus move itself in the vineyard, orchard or on unpaved roads.
Crawler, like its predecessor Androver II, can use the AVN algorithm to go from row to row, even if they do not end in a parallel line. The user simply uses the application to select how many rows the robot should go through and start navigation. In addition to its movement with the help of neural networks, the robot also detects obstacles in the way and, if necessary, stops in front of them. The idea is also to connect the AVN algorithm with the AON algorithm and the device would move itself not only in the vineyard, but also on its way to it. RoboTech Vision is completing an docking system, to which the robot will navigate autonomously, in the event of a low battery, and recharge.
Author of the post
Related articles
RoboTech Vision has developed a new Caster indoor robotic platform
An autonomous robot by RoboTech Vision will inspect a power substation
We are completing autonomous navigation in the vineyard using a visual system
Categories
LATEST POSTS

Androver II underwent testing for a geological project
Androver II underwent testing for a geological projectJuly 19, 2018 | News A geological research company shown interest in the prototype Androver II mobile robot developed by RoboTech Vision. The robot should become part of a project that...
RoboTech Vision visited the international exhibition Automatica
RoboTech Vision visited the international exhibition AutomaticaJune 21, 2018 | Presentation RoboTech Vision visited the largest exhibition for automation and service robotics in Munich. The team looked at the latest innovations and technologies...

The first test of Androver II was successful
The first test of Androver II was successfulMarch 19, 2018 | Development The Androver II mobile robot developed by RoboTech Vision successfully passed the first test outdoors. The robot is controlled by a teleoperator and is to be part of a...