RoboTech Vision predstavuje nový pásový robot do terénu s názvom Crawler

4. august 2021 | Novinky
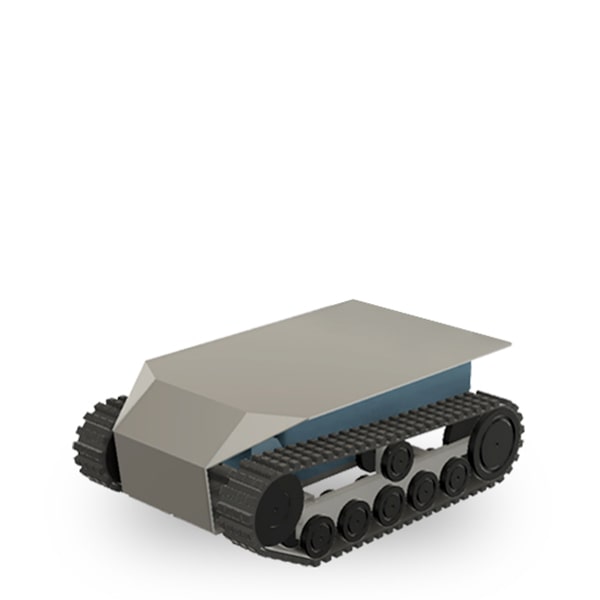
Viac ako polrok od uvedenia prvej komerčnej robotickej platformy Caster, určenej najmä do interiéru, sa spoločnosť RoboTech Vision rozhodla rozšíriť portfólio o ďalší robot zvaný Crawler. Ide o platformu, ktorej základom je pásový podvozok vhodný pre náročný terén s akým sa zariadenie stretne napríklad v poľnohospodárstve, vojenskom priemysle či pri prieskume neznámej oblasti.
Hoci sa spoločnosť RoboTech Vision nikdy nezameriavala primárne na vývoj hardvéru, po rokoch odlaďovania autonómnych navigačných algoritmov dospela aj do tohto štádia. „Pri testovaní softvéru máte dve možnosti. Vytvoriť simuláciu, kde väčšinou všetko ideálne funguje, no líši sa to od reality, alebo otestovať algoritmy priamo v teréne. Naša spoločnosť uprednostňuje druhú možnosť. K tomu boli potrebné robotické podvozky. Začínali sme s testovacími platformami, a tak sme postupne dospeli aj ku komerčným robotom,“ tvrdí konateľ spoločnosti RoboTech Vision Ing. Martin Smoľák.
Navigácia pomocou umelej inteligencie
Medzi testovacie a vývojové platformy patril robot Androver II s Double Ackerman podvozkom vyvinutý od základov RoboTech Vision a robot Husky A200 s diferenciálnou kinematikou od kanadskej spoločnosti Clearpath. Algoritmy spoločnosti tak boli odlaďované pre rôzne kinematické štruktúry aj rôzne prostredia. „Robot Androver II sme využívali najmä pre autonómnu navigáciu vo vinohrade, naopak Huskyho sme vyčlenili pre autonómnu navigáciu po ceste. Teraz tieto platformy nahradia roboty vhodné aj na predaj,“ dopĺňa ďalší z konateľov spoločnosti Ing. Peter Pásztó PhD. Kým robot Caster je vyvinutý najmä do interiéru, robot Crawler je určený skôr do terénu. Spoločnosť čoskoro plánuje predstaviť aj ďalší model Differ určený pre spevnené cesty v exteriéri a rôzne prieskumné účely.
„Roboty Caster, Crawler aj pripravovaný Differ budú postavené na báze diferenciálneho podvozku. Testovacia platforma Androver II však mala Double Ackerman kinematiku. Neznamená to, že by sa nám otáčanie všetkých kolies v teréne neosvedčilo. Práve naopak. Plánujeme vyvinúť aj komerčnú platformu s Double Ackermanom. Avšak konkrétne vo vinohrade, kde sa štvorkolesový Androver II využíval, sa pásový podvozok ukázal ako vhodnejší. Museli sme preto autonómnu navigáciu vo vinohrade prispôsobiť aj diferenciálnemu podvozku. Dnes tak už vieme všetky naše algoritmy veľmi rýchlo adaptovať na podvozky rôznych kinematických štruktúr a nasadiť ich nielen na robot, ale aj iné existujúce zariadenie. Autonómny pohyb pritom funguje bez GPS iba za pomoci vizuálneho systému a umelej inteligencie, čo jeho možnosti využitia rozširuje.“

Autonómny robot aj auto
Podobný pokus spoločnosť RoboTech Vision už realizovala, keď časť AON algoritmu upravila aj pre účely vytvorenia asistenta pre prejazd v teréne. Algoritmy, ktoré boli dovtedy nasadené iba na robote aplikovali spolu so senzorickým systémom na automobil, ktorý potom dokázal nájsť v teréne vhodnú cestu pre autonómny pohyb. Spoločnosť tak počas dlhoročného vývoja pracuje nielen s rôznymi typmi zariadení, ale aj s rôznymi typmi úloh a rôznymi prostrediami. Príkladom je tiež úspech robota Androver I, ktorý si na simulovanej vesmírnej misii najlepšie poradil s náročným sopečným terénom. Práve náročný terén bude tiež jednou z hlavných výziev robota Crawler.
„Robot Crawler sme vyvíjali tak, aby si poradil s nerovným terénom, neprehrieval sa a jeho výdrž bola čo najväčšia. Toto boli často najväčšie obmedzenia testovacích platforiem, nakoľko v našom softvéri využívame výpočtovo náročné neurónové siete. Crawler je navyše veľmi tichá a presná platforma. Zabezpečujú to najmä BLDC pohony so šnekovými prevodovkami či presné polohové riadenie robota. Zariadenie preto môže vykonávať aj naozaj citlivé operácie, akými sú napríklad lokálne postreky vinohradu. Crawlera je tiež možné zaťažiť 80 kilogramovým nákladom alebo naň pripevniť napríklad kosačku, ktorá bude popri pohybe udržiavať terén.“
Detekcia prekážok a dokovanie
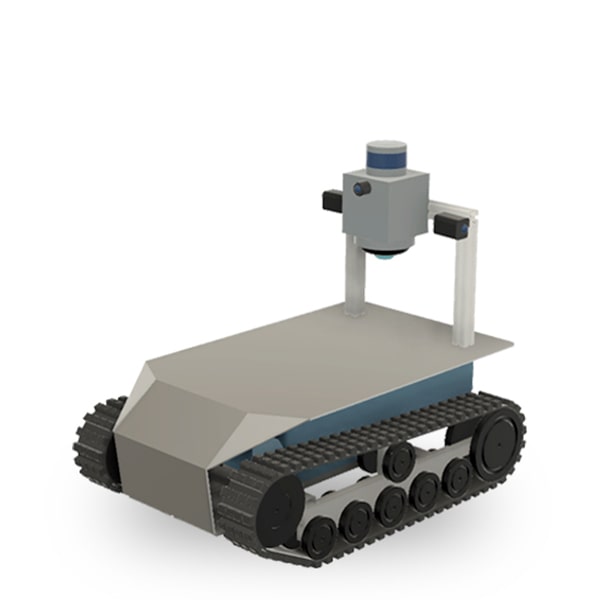
Spoločnosť ponúka viacero verzií robota. Prvou je R&D platforma vhodná najmä pre univerzity či výskumné inštitúcie, ktoré si zariadenie dokážu ďalej upravovať podľa svojich predstáv, alebo si naň nasadia vlastné senzory. Druhým typom je robot ovládaný teleoperátorom pomocou aplikácie, ktorý je možné vybaviť robotickým ramenom od spoločnosti Spinbotics či iným zariadením podľa požiadaviek. Všetky verzie robota majú ochranu IP 65 a nízko položené ťažisko, čo ich pole pôsobenia rozširuje nezávisle od počasia či sklonu terénu. Najvyššou triedou je autonómna verzia doplnená o RTV senzor Box a AVN algoritmus. Zariadenie sa tak dokáže samo pohybovať vo vinohrade, ovocnom sade alebo po nespevnených cestách.
Crawler, rovnako ako jeho predchodca Androver II, dokáže s AVN algoritmom chodiť z riadku do riadku, aj vtedy ak nekončia v rovnobežnej línii. Užívateľ jednoducho pomocou aplikácie zvolí, koľko riadkov má robot prejsť a spustí navigáciu. Robot popri svojom pohybe za pomoci neurónových sietí navyše deteguje prekážky v ceste a v prípade potreby pred nimi zastaví. Ideou je tiež prepojiť AVN algoritmus s AON algoritmom a zariadenie by sa pohybovalo samé nielen vo vinohrade, ale aj po ceste k nemu. Spoločnosť RoboTech Vision aktuálne dokončuje tiež dokovací systém, ku ktorému robot v prípade nedostatku batérie autonómne zájde a dobije sa.
Autor príspevku
Podobné články
RoboTech Vision vyvinula novú robotickú platformu Caster do interiéru
Autonómny robot vyvinutý RoboTech Vision bude vykonávať obhliadky elektrickej stanice
Dokončujeme našu autonómnu navigáciu vo vinohrade pomocou vizuálneho systému
Kategórie
NAJNOVŠIE PRÍSPEVKY

RoboTech Vision pokračuje vo vývoji autonómneho robota určeného pre obranné účely armády
RoboTech Vision pokračuje vo vývoji autonómneho robota určeného pre obranné účely armády3. február 2026 | Novinky Po tom, čo spoločnosť RoboTech Vision ukončila prvú časť projektu - štúdiu k Semiautonómnemu prieskumnému robotickému vozidlu, sa...

RoboTech Vision sa zúčastnila Wuzhen Summitu 2025 a navštívila Unitree, WeRide aj Alibaba AI labs
RoboTech Vision sa zúčastnila Wuzhen Summitu 2025 a navštívila Unitree, WeRide aj Alibaba AI labs1. december 2025 | Novinky Členovia spoločnosti RoboTech Vision sa spolu s tímami Elevate a Dius AI zúčastnili World Internet Conference 2025 v Číne....

RoboTech Vision získala projekt na podporu obrany štátu financovaný MOSR
RoboTech Vision získala projekt na podporu obrany štátu financovaný MOSR27. február 2023 | Novinky Po tom, čo bola spoločnosť RoboTech Vision minulý rok vybraná Ministerstvom obrany Slovenskej republiky na prezentáciu svojich riešení na...