Príklady využitia umelej inteligencie: Robot rozpoznáva tváre a roznáša nápoje23. marec 2022 | Vývoj Umelá inteligencia má široké využitie. Dokáže pomôcť človeku pri triedení dát, napomáha spracovaní obrazu a automatizuje aj rôzne iné procesy....

Prečítajte si o novinkách spoločnosti RoboTech Vision či podujatiach, na ktorých sa firma snaží popularizovať robotiku a prezentovať svoju prácu doma aj v zahraničí. V blogu nájdete aj príspevky o vývoji mobilnej robotiky alebo jej príbuzné témy a zaujímavosti.

Príklady využitia umelej inteligencie: Robot rozpoznáva tváre a roznáša nápoje23. marec 2022 | Vývoj Umelá inteligencia má široké využitie. Dokáže pomôcť človeku pri triedení dát, napomáha spracovaní obrazu a automatizuje aj rôzne iné procesy....

Autonómna navigácia aj dobíjanie. Vyvíjame vlastný dokovací systém pre mobilné roboty21. december 2021 | Vývoj Dokovanie je významná súčasť autonómnej navigácie. Bez nej by neboli roboty úplne sebestačné. Uvedomuje si to aj spoločnosť RoboTech...

Robot Crawler sa autonómne pohybuje vo vinohrade a kosí pritom trávu22. september 2021 | Vývoj Mobilný robot Crawler, ktorý spoločnosť nedávno zaradila do svojho portfólia, našiel uplatnenie aj vo vinohrade. Nahradil tak testovaciu platformu...
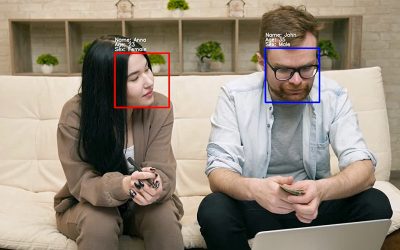
Rozpoznávanie objektov aj tvárí. Ako funguje detekcia pomocou neurónových sietí?22. jún 2021 | Vývoj Vývoj umelej inteligencie napreduje rýchlym tempom vpred. Mnohé neurónové siete tak už nemajú problém rozlíšiť v obraze osobu, jej tvár či iné...

Dokončujeme našu autonómnu navigáciu vo vinohrade pomocou vizuálneho systému21. december 2020 | Vývoj Testovacia robotická platforma Androver II kompletne vyvinutá spoločnosťou RoboTech Vision sa dokáže vďaka nášmu algoritmu autonómne pohybovať...

RoboTech Vision vyvinula novú robotickú platformu Caster do interiéru17. december 2020 | Vývoj Po dlhoročnom vývoji softvéru s prvkami umelej inteligencie a jeho testovaní na rôznych typoch robotických platforiem sa spoločnosť RoboTech Vision...

Otestovali sme našu autonómnu navigáciu pomocou mapy v troch rôznych prostrediach30. júl 2020 | Vývoj Robot Husky A200 od kanadskej spoločnosti Clearpath dokáže vďaka nášmu algoritmu prejsť zadanú trasu autonómne v rôznych prostrediach. Využíva k...

Zdokonalili sme autonómnu navigáciu vizuálnym systémom a detekciu prekážok26. november 2019 | Vývoj Robot Androver II kompletne vyvinutý spoločnosťou RoboTech Vision sa dokáže vďaka nášmu algoritmu pohybovať autonómne v neznámom prostredí. Na...

Vyvinuli sme autonómnu navigáciu pomocou mapy a obchádzanie prekážok13. november 2019 | Vývoj Robotická platforma Husky A200 od kanadskej spoločnosti Clearpath Robotics sa vďaka nášmu algoritmu autonómne pohybuje po zadanej trase a obchádza pri...

Robot Androver II sa pohybuje autonómne medzi riadkami vinohradu16. júl 2019 | Vývoj V marci 2019 sme po prvýkrát testovali našu autonómnu navigáciu vo vinohrade na robote Androver II. Po úpravách v senzorickom systéme teraz robot dokáže...
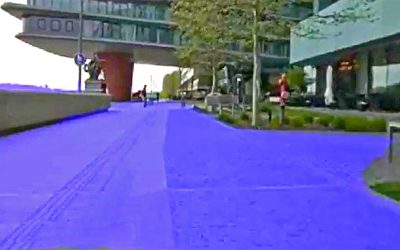
Robot Androver II prešiel pomocou nášho algoritmu autonómne až 1,5 km28. máj 2019 | Vývoj Detekcia značky, rozpoznávanie a nasledovanie objektov, scanovanie riadkov vinohradu a najnovšie aj segmentácia vhodnej cesty pre pohyb. To všetko sú...

Prvý test autonómnej navigácie vo vinohrade bol úspešný7. marec 2019 | Vývoj Androver II úspešne absolvoval prvý test autonómnej navigácie vo vinohrade. Robot k svojmu pohybu využíva 2D laserový scanner, pomocou ktorého deteguje riadky viniča....
Spoločnosť sa zameriava na vývoj autonómnych robotov s prvkami AI. Firma sa snaží vyvíjať univerzálne riešenia pre rôzne odvetvia, prostredia a typy úloh.
AON algoritmus
AVN algoritmus
ADN algoritmus
ORC algoritmus
Caster
Crawler
RTV senzor Box

