SIMULOVANÁ MISIA
Androver I na vesmírnej misii
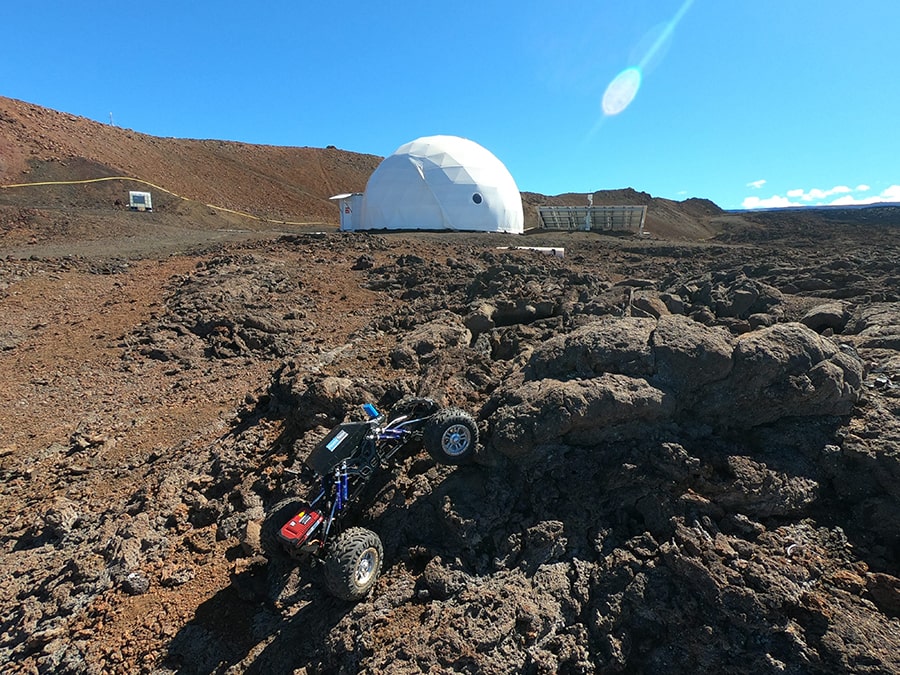
Androver I je mobilný robot vyvinutý spoločnosťou RoboTech Vision, ktorý sa využíval pre potreby simulovanej vesmírnej misie v stanici HI-SEAS na Havaji, realizovanej pod záštitou ESA. Misia, ktorej velila astrobiologička Michaela Musilová bola zameraná na výskum lávových jaskýň, podobných mesačnému povrchu, v ktorých by raz ľudia mohli postaviť prvé obydlia.
Cieľom rovera bolo otočnou kamerou zdokumentovať náročnú sopečnú oblasť aj v menej dostupných častiach. Rover tímu pomáhal tým, že sa vedel pohybovať hladko po veľmi ostrom a strmom teréne. Tím ho používal na prieskum prekážok, ktoré by mohli ublížiť astronautom. Robot sa ovláda joystickom a v teréne sa efektívnejšie pohybuje vďaka podvozku typu Double Ackerman.
VLASTNOSTI A TECHNOLÓGIE
Teleoperátorské ovládanie
Mobilný robot sa ovláda pomocou ergonomického joysticku, ktorého rádiové spojenie má dosah približne 500 metrov.
Kamera na prieskum okolia
Kamera umiestnená v prednej časti robota poskytuje živý prenos obrazu. Tím tak dokáže preskúmať menej dostupné či nebezpečné oblasti.
Double Ackerman podvozok
Efektívnu priechodnosť robota terénom zabezpečuje Double Ackerman podvozok, s dvomi DC motormi a dvomi servomotormi.
REFERENCIE

„Na misii sme testovali aj dve iné robotické vozítka, ktoré nám poskytla ESA. Tiež sme mali nájsť limity ich pôsobenia v teréne a možné aplikácie na misiách. Zo všetkých troch roverov najlepšie fungoval Androver I od spoločnosti RoboTech Vision. Mal najväčšiu výdrž, prekonal najťažšie prekážky a k tomu sme ho vedeli riadiť z vnútra stanice HI-SEAS.“
– Dr. Michaela Musilová, SOSA



Spoločnosť sa zameriava na vývoj autonómnych robotov s prvkami AI. Firma sa snaží vyvíjať univerzálne riešenia pre rôzne odvetvia, prostredia a typy úloh.
SOFTVÉR
AON algoritmus
AVN algoritmus
ADN algoritmus
ORC algoritmus
PRODUKTY
Caster
Crawler
RTV senzor Box
KONTAKT
Červený kameň 61
900 89 Častá
Slovensko

